如何提升智能驾驶辅助系统的可靠性,是各大汽车厂商必须要面对的问题。现在行业的主流做法是,通过超声波和摄像头混合采集数据,然后由中枢系统进行处理,从而实现自适应巡航、车道保持、行人车辆避让等等。其中,超声波的主要作用是探测车辆周围物体距离的距离信息,而摄像头则提供图像信息。阿维塔11的智能驾驶辅助系统,虽然采用了行业主流的技术方案,但在实现效果上却更好。这到底是怎么回事呢?今天,笔者就根据阿维塔官方给出的信息,并结合自身相关的知识,给大家做一个通俗易懂的讲解。

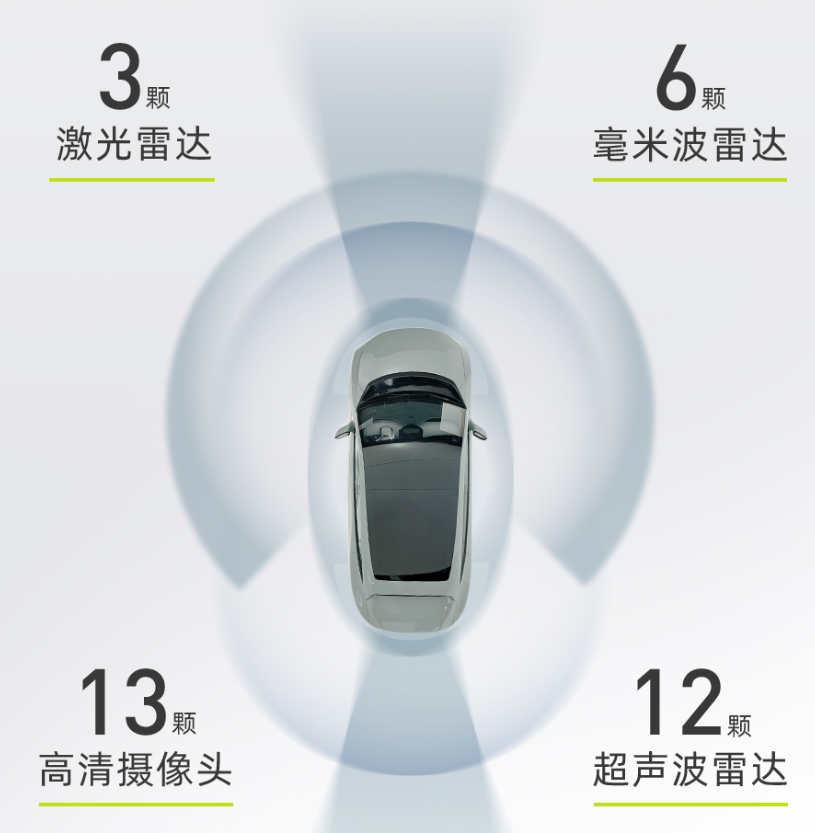
首先,我们需要了解阿维塔11都有哪些传感器。通过图片来看,阿维塔11所搭载的AVATRUST超感系统,包含了34颗传感器,分别是3颗激光雷达、6颗毫米波雷达、13颗高清摄像头和12颗超声波雷达。这些传感器各司其职,能够采集到车辆周围足够多的物体距离和图像信息,给AVATRUST超算系统提供数据支撑。
而阿维塔11智能驾驶辅助系统先进的地方,就在于传感器的数量、种类和性能。其中,3颗激光雷达传感器分别安装在车辆的正前方,以及左右A柱的位置,能够形成300°视场角的覆盖。补充一点,我们眼睛正常情况下的视场角是200°,加上后视镜的帮助,视场角可以达到260°。也就是说,这3颗激光雷达提供的距离检测范围,比我们的眼睛还要大。这样一来,阿维塔11就能够在左右转向时,更早知晓侧后方的来车,提醒驾驶者做出避让,或直接介入做出避让动作。

而分别位于车辆前段和后段的6颗毫米波雷达,则能够为AVATRUST超算系统提供全方位的周围物理距离信息。不仅如此,安装在车辆后方的中长距离的毫米波雷达,最大探测距离可以达到210米,并提供极其精准的移动速度测量数据。这是非常关键的一个点,因为在高速上,一旦发生追尾极有可能造成连环车祸,车辆后方的毫米波雷达能够精准测量车辆距离,就能够让AVATRUST超算系统根据相对速度的计算,最大程度规避风险。例如,当后方车辆速度过快,马上就要追尾时,智能驾驶辅助系统在理论上,就可以通过加速、变道等方式,来避免追尾的发生。

即使配备如此多种类的雷达,车辆的智能驾驶辅助系统,依然还属于“盲人摸象”的阶段,需要摄像头加入才能真正“看得见”。因此,阿维塔11还在车辆不同部位,安装了13颗高清摄像头。值得一提的是,摄像头与雷达并不是独立工作,它们可以相互协同。例如,雷达除了能探测物体的距离,还可以提升摄像头的对焦速度。这非常关键,因为对焦速度代表成像瞬间的清晰度,所以摄像头能保证时刻高清成像,也能够提升智能驾驶辅助系统的可靠性和稳定性。
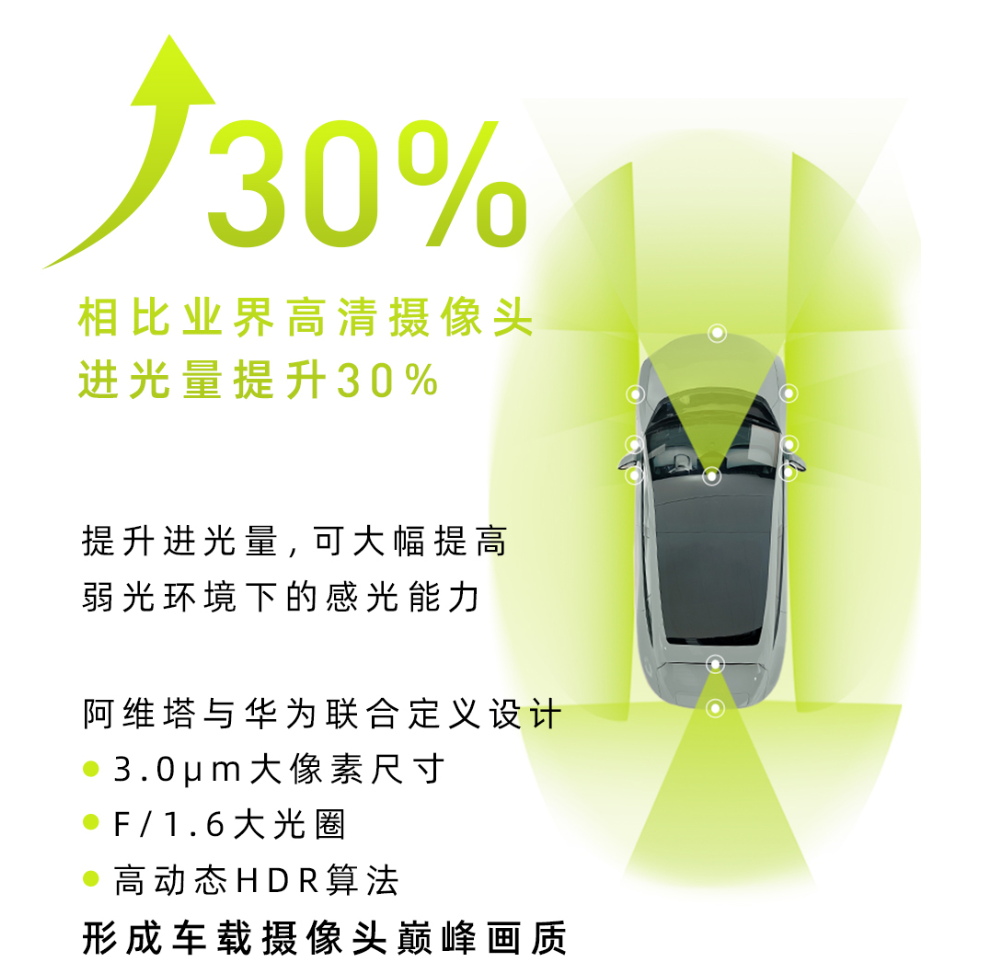
当然,摄像头本身的成像素质,也是非常关键的因素。对影像有了解的朋友应该都知道,摄像头传感器面积越大、单像素感光面积越大,图像的动态范围、清晰度等指标就会更好。基于华为在移动影像领域的深厚技术积累,阿维塔与华为联合打造的摄像头,感光性能相比业界主流方案提升了足足30%,能够在低光场景带来更加出众稳定的图像质量。此外,考虑到穿越隧道等场景,车辆会在明暗场景快速变化,摄像头可能会出现短暂的过曝、欠曝等情况,因此阿维塔11还引入了HDR高动态范围算法,确保摄像头具备更大范围记录明暗信息的能力,这也是提升智能驾驶辅助系统可靠性和稳定性的方法。

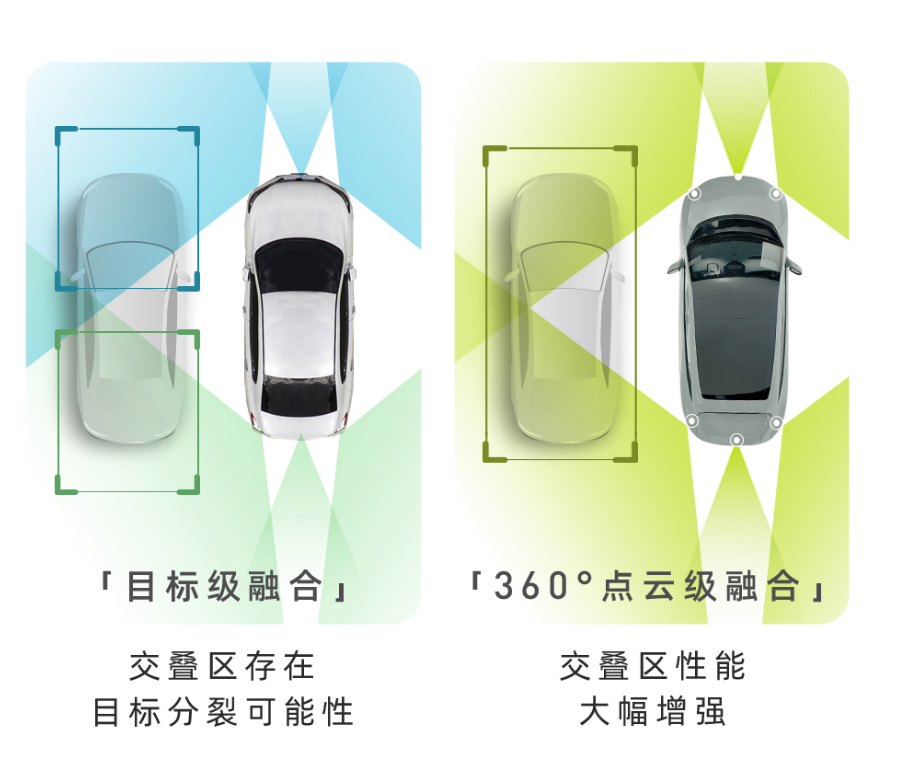
说到算法,阿维塔11如此多的雷达、摄像头,必然会出现探测范围的重叠,因此也需要算法进行修正。对此,阿维塔继续与华为联合,打造了360°点云级融合技术,这项技术的优点在于,能够极大程度降低重复区域可能出现的目标撕裂、分裂等情况。对于智能驾驶辅助的可靠性和稳定性提升,有着非常重要的作用。
总的来说,阿维塔11的智能驾驶辅助硬件和算法,可以说是目前业界最完善、最前沿的方案,不论是探测范围、探测精度、测速精度、图像质量,还是融合成像算法,都做到了业界第一梯队的水平。这或许就是阿维塔11的智能泊车辅助,为何被称为业界天花板的原因,智能驾驶辅助的硬件完善程度如此之高,泊车这样一个相对简单的场景,自然不在话下。当然,理论终究要落地到实际体验。
据悉,11月中旬,阿维塔将会在苏州阳澄湖畔举办“阿维塔智驾体验日”活动,全场景展示其智驾的实力。如果你希望参与活动,切身感受阿维塔11智能驾驶辅助系统的出色之处,可以关注阿维塔官方后续的消息。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。